Robô submarino biônico sabe navegar em águas calmas ou turbulentas
Redação do Site Inovação Tecnológica - 29/08/2022
[Imagem: Qiyuan Cao et al. - 10.34133/2022/9806328]
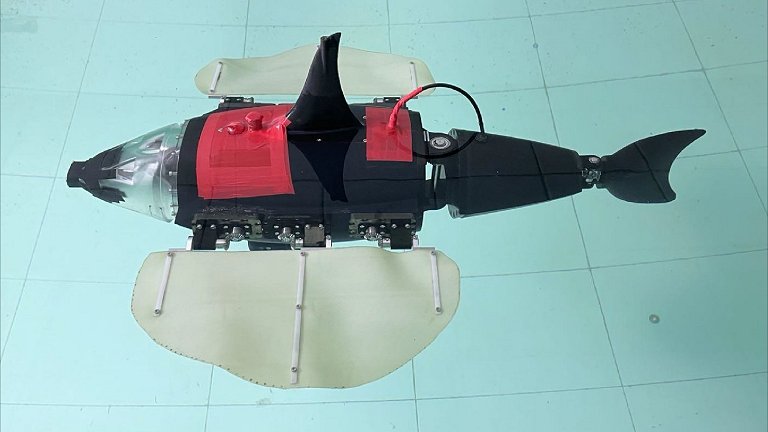
Robô submarino biônico
Robôs subaquáticos estão sendo amplamente utilizados como ferramentas em uma variedade de tarefas marítimas e pesquisas científicas, mas nenhum deles chega próximo da manobrabilidade dos peixes.
Para tentar diminuir essa distância, foi criado o RobDact, um veículo submarino biônico inspirado em um peixe chamado Dactylopteridae, conhecido por suas largas barbatanas peitorais, que lhe dão uma grande capacidade de controle.
Embora uma hélice seja suficiente para mover um submarino em águas calmas, robôs subaquáticos precisam ser capazes também de "pairar" em baixas velocidades em águas turbulentas, enquanto realizam sua tarefa - e uma hélice não é a melhor opção nessas condições.
Outro fator quando um robô subaquático está se movendo em baixas velocidades em águas instáveis é o movimento de "contorcimento" da hélice - essa contração gera pulsos de fluido imprevisíveis que reduzem a eficiência do robô.
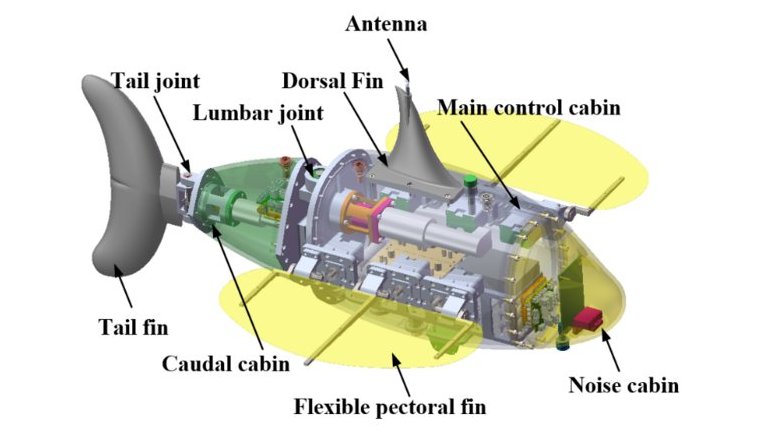
Partindo da anatomia do peixe, e combinando simulações computacionais de dinâmica de fluidos e um experimento de medição de força, Qiyuan Cao e seus colegas da Universidade da Academia de Ciências da China criaram um modelo hidrodinâmico preciso que deu ao robô uma capacidade de manobra sem precedentes.
[Imagem: Qiyuan Cao et al. - 10.34133/2022/9806328]
Controle inteligente
O experimento prático permitiu determinar a força hidrodinâmica do robô em diferentes velocidades, o que exigiu a construção de uma plataforma de medição de força capaz de medir nas direções X, Y e Z.
Esses dados permitiram construir um mapa que estabelece as relações entre os parâmetros de flutuação do robô e o empuxo do veículo.
Esse mapeamento de empuxo, juntamente com o modelo dinâmico do corpo rígido do RobDact, permitiu então desenvolver o modelo hidrodinâmico, que assim se tornou preciso e prático para as mais diversas condições ambientais que o robô possa encontrar.
Isso significa que o robô poderá lidar por conta própria com as variações do ambiente, incluindo mudanças de correnteza e fluxos de água nos três eixos, além de se adaptar para manter uma velocidade determinada ante condições variáveis.
A equipe pretende agora acrescentar métodos de inteligência artificial, como o aprendizado por reforço, ao seu modelo hidrodinâmico, para aprimorar ainda mais o controle inteligente de veículos submarinos.
"O objetivo final é promover a aplicação prática de veículos submarinos biônicos no monitoramento do ambiente aquático e busca e resgate subaquáticos," disse Rui Wang, coordenador da equipe.
Artigo: Hydrodynamic Modeling and Parameter Identification of a Bionic Underwater Vehicle: RobDact
Autores: Qiyuan Cao, Rui Wang, Tiandong Zhang, Yu Wang, Shuo Wang
Revista: Cyborg and Bionic Systems
DOI: 10.34133/2022/9806328







Humanos como hardware: Computação é feita na pele do nosso braço
Descoberta nova fase da matéria: "Meio gelo, meio fogo"
Constantes fundamentais da natureza garantem supercondutores a temperatura ambiente
Ar-condicionado verde e de estado sólido alcança escala de quilowatts
Eletricidade é gerada usando rotação da Terra em seu próprio campo magnético
Painéis solares poderão ser fabricados na Lua fundindo o solo lunar
Espaço formado por "átomos de espaço" unifica mecânica quântica e relatividade
Água líquida não é única: São dois líquidos diferentes
Rival dos computadores quânticos tem avanço revolucionário
Lançado um "linux" para computadores quânticos
Humanos como hardware: Computação é feita na pele do nosso braço
Pequenos robôs viram células de materiais inteligentes que imitam a vida
Matéria ativa: Partículas inertes viram vermes sintéticos tridimensionais
Sensações táteis sem precedentes são obtidas com músculos artificiais
Inteligência não é suficiente. Vem aí a Imaginação Artificial
Leis da Robótica de Asimov precisam de atualização para IA
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.