Robô inovador voa como drone e pousa como pássaro
Redação do Site Inovação Tecnológica - 02/12/2021

[Imagem: William Roderick]
Pousando como um pássaro
Se a robótica tem decepcionado ultimamente, com demonstrações pouco criativas, um trio de engenheiros das universidades de Stanford (EUA) e Groningen (Países Baixos), de fato conseguiu dar a volta por cima.
Eles criaram um pássaro robótico que é capaz de voar, como seria de se esperar, mas que - e aí reside sua grande inovação - consegue pousar em qualquer galho, como um pássaro de verdade.
A grande dificuldade é que, na natureza, não existem dois galhos iguais. Os galhos diferem em diâmetro, forma e textura; alguns podem estar molhados, cobertos de musgo ou repletos de ramos - e, ainda assim, os pássaros conseguem pousar em qualquer um deles.
Desta forma, fazer um robô reconhecer um galho, identificar suas características e pousar nele não é uma tarefa nada trivial.
"Não é fácil imitar como os pássaros voam e empoleiram-se," disse William Roderick, membro da equipe. "Após milhões de anos de evolução, eles fazem a decolagem e o pouso parecerem tão fáceis, mesmo em meio a toda a complexidade e variabilidade dos galhos de árvores que você encontraria em uma floresta."
Apesar da dificuldade, a equipe conseguiu montar toda a engenharia de software e de hardware necessária para fazer um robô voador pousar como um pássaro.
[Imagem: W. R. T. Roderick et al. - 10.1126/scirobotics.abj7562]
Robô-pássaro
A parte voadora do robô não é mais do que um drone comum. A grande inovação, na verdade, está no seu "trem de pouso".
A equipe conseguiu projetar um sistema biomimético que imita as pernas dos pássaros com uma precisão e uma flexibilidade surpreendentes.
Como tiveram que fazer algumas adaptações e obedecer às restrições impostas na migração de uma perna biológica para uma perna mecatrônica, a equipe chama esta parte do robô de "agarrador aéreo estereotipado inspirado na natureza", ou SNAG (Stereotyped Nature-Inspired Aerial Grasper).
A parte voadora pode ser trocada por qualquer tipo de drone, conforme a necessidade, uma vez que são as pernas robóticas que permitirão que o robô não apenas empoleire-se em várias superfícies e tipos de galhos, mas também pegue e carregue objetos.
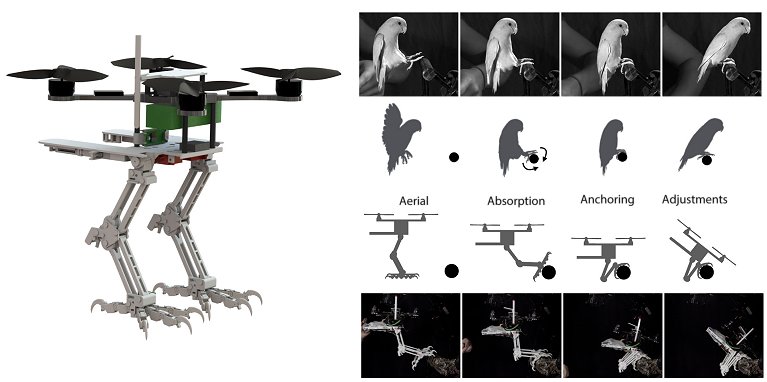
A inspiração para a construção do sistema SNAG veio de uma criteriosa observação dos voos e pousos de periquitos, conforme eles iam e vinham entre uma série de poleiros - foram usadas cinco câmeras de alta velocidade e diversos sensores instalados nas pernas dos periquitos e nos poleiros.
"O que nos surpreendeu foi que eles fizeram as mesmas manobras aéreas, não importando as superfícies em que estavam pousando," contou Roderick. "Eles permitem que os pés lidem com a variabilidade e complexidade da própria textura da superfície."
Contudo, para levar em conta o tamanho do quadricóptero que pretendiam usar, os pesquisadores construíram seu SNAG dimensionado de acordo com as pernas de um falcão-peregrino, cujo pouso não parecia ser diferente - o falcão peregrino também já havia sido inspiração para um robô que imita as asas e a cauda dos pássaros.
[Imagem: W. R. T. Roderick et al. - 10.1126/scirobotics.abj7562]
Pernas de pássaro robóticas
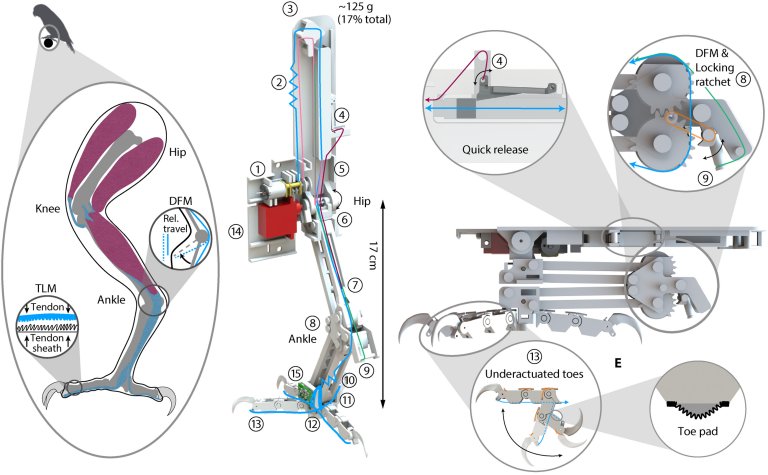
Para criar as pernas robóticas, o mecanismo tem uma estrutura impressa em 3D no lugar dos ossos, e motores e linhas de pesca para fazer as vezes de músculos e tendões.
Cada perna tem um motor para se mover para frente e para trás e outro para agarrar no poleiro. Inspirado pela maneira como os tendões passam ao redor do tornozelo das aves, um mecanismo semelhante na perna do robô absorve a energia do impacto da aterrissagem e a converte passivamente em força de agarramento.
O resultado é que o robô tem uma embreagem especialmente forte e de alta velocidade, que pode ser acionada para fechar em 20 milissegundos. Uma vez enrolados em um galho, os tornozelos do SNAG travam e um acelerômetro no pé direito informa que o robô pousou, acionando um algoritmo de equilíbrio para estabilizá-lo.
Mas a equipe foi além, tornando o sistema de visão artificial do robô capaz de detectar bem mais do que galhos: A equipe demonstrou a capacidade do robô de pegar objetos lançados com as mãos, incluindo um pequeno boneco de pelúcia imitando uma presa, um saquinho de feijão e uma bola de tênis. Os testes de pouso no mundo real foram feitos em uma pequena floresta nos arredores da universidade.
Estudar o mundo natural
Existem inúmeras aplicações possíveis para este robô, incluindo busca e salvamento e monitoramento de incêndios florestais. Ele também pode ser conectado a diferentes tecnologias de drones para funções específicas.
A proximidade do SNAG com as aves também permite uma visão única da biologia das aves. Por exemplo, os pesquisadores testaram dois arranjos diferentes de dedos, um anisodáctilo, que tem três dedos na frente e um atrás, como um falcão peregrino, e zigodáctilo, que tem dois dedos na frente e dois atrás, como os papagaios. Os dois apresentaram desempenhos muito similares.
"Parte da motivação subjacente deste trabalho foi criar ferramentas que possamos usar para estudar o mundo natural," disse Roderick. "Se pudermos ter um robô que possa agir como um pássaro, isso poderá abrir formas completamente novas de estudar o ambiente."
Artigo: Bird-inspired dynamic grasping and perching in arboreal environments
Autores: William R. T. Roderick, Mark R. Cutkosky, David Lentink
Revista: Science Robotics
Vol.: 6, Issue 61
DOI: 10.1126/scirobotics.abj7562







Humanos como hardware: Computação é feita na pele do nosso braço
Descoberta nova fase da matéria: "Meio gelo, meio fogo"
Constantes fundamentais da natureza garantem supercondutores a temperatura ambiente
Ar-condicionado verde e de estado sólido alcança escala de quilowatts
Eletricidade é gerada usando rotação da Terra em seu próprio campo magnético
Painéis solares poderão ser fabricados na Lua fundindo o solo lunar
Água líquida não é única: São dois líquidos diferentes
Espaço formado por "átomos de espaço" unifica mecânica quântica e relatividade
Rival dos computadores quânticos tem avanço revolucionário
Lançado um "linux" para computadores quânticos
Humanos como hardware: Computação é feita na pele do nosso braço
Pequenos robôs viram células de materiais inteligentes que imitam a vida
Matéria ativa: Partículas inertes viram vermes sintéticos tridimensionais
Sensações táteis sem precedentes são obtidas com músculos artificiais
Inteligência não é suficiente. Vem aí a Imaginação Artificial
Leis da Robótica de Asimov precisam de atualização para IA
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.