Robô água-viva pretende nadar sem cérebro
Redação do Site Inovação Tecnológica - 05/04/2013
[Imagem: Amanda Loman/Virginia Tech]
Biomimetismo
Os robôs submarinos, usados largamente para monitoramento oceânico, tipicamente têm o formato de um tubo, lembrando mais um torpedo do que um robô.
Alex Villanueva e seus colegas da Virginia Tech, nos Estados Unidos, preferem robôs marinhos que se pareçam com criaturas marinhas.
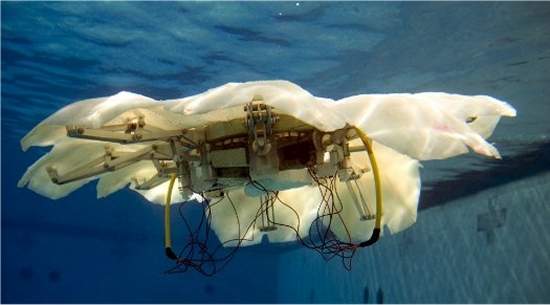
Para isso, eles criaram uma água-viva robótica, um robô cujo esqueleto movimenta uma cobertura gelatinosa bioinspirada, fazendo movimentos suaves, potencialmente consumindo menos energia.
O robô é uma melhoria de uma versão anterior, que se movimentava impulsionado por músculos artificiais alimentados a hidrogênio.
A nova versão, que é mais mecânica e bem maior, recebeu o nome de Cyro, uma junção das iniciais da água-viva em que seu projeto foi inspirado (cyanea capillata) e robô.
"Um veículo maior pode levar mais carga útil, terá duração mais longa e uma faixa operacional maior," disse Villanueva.
[Imagem: Amanda Loman/Virginia Tech]
Robô bioinspirado
A inspiração na água-viva deve-se ao seu metabolismo muito lento, com baixo consumo de alimento - imitando o animal, os pesquisadores esperam gastar menos energia das baterias para movimentar o robô.
"Nós esperamos melhorar esse robô e reduzir o consumo de energia, além de aumentar o desempenho no nado imitando melhor a morfologia da água-viva natural. Nós esperamos que o Cyro nos ajude a entender melhor como o mecanismo de propulsão desses animais se escalona com o tamanho," disse Villanueva.
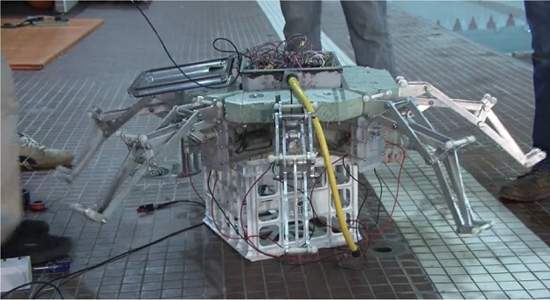
O robô manobra razoavelmente bem na água usando uma estrutura de suporte rígida com braços acionados por motores elétricos.
Os braços, por sua vez, agitam uma cobertura feita com uma mesoglea artificial - a mesoglea é uma substância gelatinosa encontrado no corpo das águas-vivas e de outros animais celenterados.

[Imagem: Amanda Loman/Virginia Tech]
Robô sem cérebro
No futuro, os cientistas esperam eliminar o processador central do robô - as águas-vivas não possuem um sistema nervoso central, usando uma rede nervosa difusa para controlar seu movimento.
O protótipo é parte de um projeto envolvendo várias universidades, com o objetivo de criar robôs autônomos para monitoramento ambiental e vigilância, além de observações científicas do comportamento animal no fundo do mar - neste caso, a aparência de um animal permite observar sem assustar os observados.







Humanos como hardware: Computação é feita na pele do nosso braço
Descoberta nova fase da matéria: "Meio gelo, meio fogo"
Constantes fundamentais da natureza garantem supercondutores a temperatura ambiente
Ar-condicionado verde e de estado sólido alcança escala de quilowatts
Eletricidade é gerada usando rotação da Terra em seu próprio campo magnético
Painéis solares poderão ser fabricados na Lua fundindo o solo lunar
Espaço formado por "átomos de espaço" unifica mecânica quântica e relatividade
Água líquida não é única: São dois líquidos diferentes
Rival dos computadores quânticos tem avanço revolucionário
Lançado um "linux" para computadores quânticos
Humanos como hardware: Computação é feita na pele do nosso braço
Pequenos robôs viram células de materiais inteligentes que imitam a vida
Matéria ativa: Partículas inertes viram vermes sintéticos tridimensionais
Sensações táteis sem precedentes são obtidas com músculos artificiais
Inteligência não é suficiente. Vem aí a Imaginação Artificial
Leis da Robótica de Asimov precisam de atualização para IA
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.