Peixe robótico ganha desenho de avião para gastar menos energia
Redação do Site Inovação Tecnológica - 30/01/2013
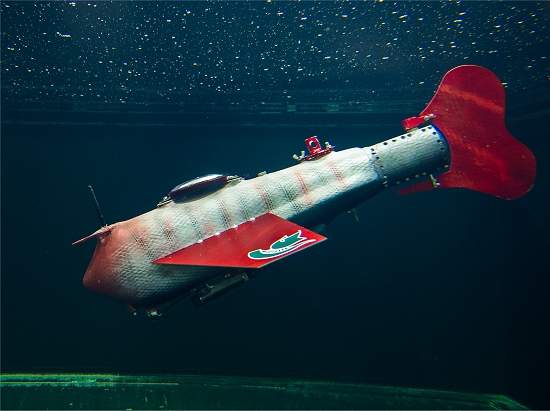
[Imagem: G.L. Kohuth/Michigan State University]
Solução hidrodinâmica
Há alguns anos, um grupo da roboticistas da Universidade de Michigan, nos Estados Unidos, vem tentando desenvolver robôs subaquáticos que possam monitorar a qualidade da água por longos períodos.
Para isso, uma das principais exigências é que esses peixes robóticos sejam capazes de navegar de forma eficiente, sem gastar muita energia, preservando suas baterias.
Na contramão dos experimentos biomiméticos, que procuram imitar as soluções da natureza, a equipe do Dr. Xiaobo Tan concluiu que é melhor transformar seu robô-peixe em algo como um robô-avião-mergulhador.
A solução aerodinâmica virou uma solução hidrodinâmica, resultando em um robô que pode deslizar suavemente, "planando" pelas águas por longos períodos, de forma totalmente passiva.
"Nadar exige o movimento contínuo da cauda, o que significa que a bateria está sendo constantemente drenada, e tipicamente não vai durar mais do que umas poucas horas," justifica o pesquisador.
Mergulho planado
Como o monitoramento aquático e outras observações científicas do meio submarino não exigem muita pressa, a equipe adicionou à velocidade da natação a suavidade do "mergulho planado".
"Nós integramos os dois modos de locomoção no nosso robô - nadar e deslizar. Essa integração permite que o robô se adapte a diferentes ambientes, das correntes velozes à profundeza das represas, da calma de um lago à correnteza de um rio," disse o pesquisador.
A capacidade de planeio subaquático foi obtida instalando uma bomba que enche e esvazia dois reservatórios no interior do robô, dependendo se os cientistas querem que ele mergulhe ou vá para a superfície.
O robô subaquático com jeito de avião ficou 10 vezes menor e mais leve do que os robôs subaquáticos utilizados hoje no monitoramento ambiental e nas pesquisas marinhas.







Captura de água da umidade do ar agora até em regiões áridas
Finalmente um cristal do tempo que você vai conseguir ver
Hidrogéis fazem fotossíntese artificial para produzir hidrogênio solar
Gato de Schrodinger recordista fica indeciso entre vivo ou morto por 23s
"Monstros Vermelhas": Webb descobre mais três galáxias que contestam teorias
Cadeias de qubits que conversam entre si são criadas no grafeno
Desvendado segredo de Urano: Foi só uma coincidência
Reator torna captura direta de CO2 mais eficiente e mais flexível
Será que a teoria de Einstein só vale na escala do Sistema Solar?
Pela primeira vez fotografamos uma estrela de outra galáxia
Robôs ganham olhos de gato para enxergar de dia e de noite
Asas de pássaros inspiram nova abordagem para segurança dos aviões
Robôs controlados por IA têm vulnerabilidades críticas
Rumo aos eletrônicos flexíveis: Placas de circuito impresso ficam totalmente maleáveis
IA está criando um processo de pensamento fora das nossas mentes?
Módulos eletro-hidráulicos montáveis viram robôs multifuncionais
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.