Microrrobô médico é o primeiro a utilizar movimento ciliar
Redação do Site Inovação Tecnológica - 12/09/2016
[Imagem: DGIST]
Microrrobôs médicos
Engenheiros coreanos apresentaram os primeiros protótipos de microrrobôs aquáticos que se movem por movimentos ciliares, inspirados nos movimentos de microrganismos como os paramécios.
Microrrobôs capazes de navegar em meio líquido estão sendo desenvolvidos com o objetivo de navegar pelos fluidos do corpo humano, para efetuar biópsias de forma menos traumática, para aplicar medicamentos diretamente nos locais onde eles são necessários e para realizar exames.
O movimento ciliar para robôs tem sido teorizado há muito tempo, mas até agora ninguém havia conseguido fazer um protótipo que o utilizasse de forma eficiente.
A maioria dos microrrobôs nadadores desenvolvidos até agora precisa que o líquido onde navegam lhes forneça o combustível para seu movimento. Mais recentemente tem havido tentativas de impulsioná-los usando campos de força ou luz fornecida por endoscópios ou ainda células musculares.
Robô ciliado
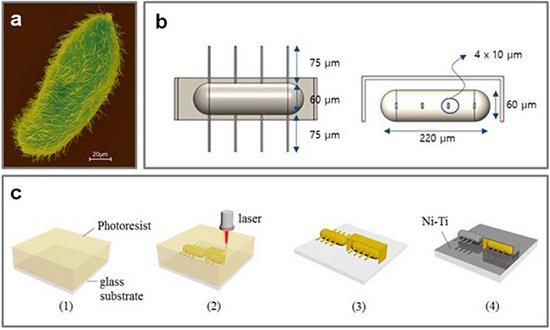
Sangwon Kim e seus colegas do Instituto de Ciência e Tecnologia Daegu criaram seus robôs ciliados usando um revestimento de níquel e titânio sobre um polímero fotocurável - que endurece sob ação da luz. Os cílios artificiais foram criados usando uma espécie de litografia a laser.
Cada microrrobô mede 220 micrômetros de comprimento e 60 micrômetros de diâmetro. Isso é bastante grande para os padrões dos microrrobôs, o que traz vantagens e desvantagens: a desvantagem é que ele não conseguirá entrar em vasos sanguíneos muito estreitos, o que pode ser compensado pela vantagem de poder levar uma quantidade de medicamento muito maior.
Para que os cílios se agitem e impulsionem o robô é aplicado externamente um campo magnético assimétrico, para que os cílios se agitem de forma coordenada.
A velocidade máxima alcançada é de 340 micrômetros por segundo, o que é nada menos do que 8,6 vezes mais rápido do que tecnologias magnéticas similares já testadas.
Artigo: Fabrication and Manipulation of Ciliary Microrobots with Non-reciprocal Magnetic Actuation
Autores: Sangwon Kim, Seungmin Lee, Jeonghun Lee, Bradley J. Nelson, Li Zhang, Hongsoo Choi
Revista: Nature Scientific Reports
Vol.: 6: 30713
DOI: 10.1038/srep30713







Hidrogênio superfluido é observado pela primeira vez
Astrônomos encontram fortes indícios de atividade biológica em exoplaneta
Gotas de chuva geram eletricidade limpa diretamente - sem geradores
Transistores são reinventados para hardware de IA
Descoberta uma exceção às leis da termodinâmica
Vidro é reinventado usando sal e ondas sonoras
Computação acústica resolve problemas eletronicamente incomputáveis
Maxwell explica: Teoria dos fótons de Einstein pode ser desnecessária
Hologramas 3D podem ser agarrados e manipulados com as mãos
Dois computadores de luz aproximam-se do lançamento comercial
Matéria ativa: Partículas inertes viram vermes sintéticos tridimensionais
Inteligência não é suficiente. Vem aí a Imaginação Artificial
Módulos eletro-hidráulicos montáveis viram robôs multifuncionais
Nanomotor inspirado em bactérias apresenta potência surpreendente
Microrrobô em forma de anel nada autonomamente em líquidos viscosos
Nanogeradores multiplicam potência e chegam à casa dos watts
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.