Arraias inspiram robô macio mais rápido já construído
Redação do Site Inovação Tecnológica - 17/12/2024
[Imagem: Haitao Qing et al. - 10.1126/sciadv.adq4222]
Robô arraia
Pesquisadores bateram seu próprio recorde de robô macio nadador mais rápido do mundo melhorando seu projeto anterior, inspirado nas arraias manta.
E, enquanto o robô anterior era pouco mais do que uma prancha nadadora - a equipe na verdade o chamava de "borboleta nadadora" -, o novo projeto é mais propriamente biomimético, uma vez que agora tornou-se uma arraia robótica que nada tanto na superfície quanto embaixo d'água.
"Há dois anos, demonstramos um robô aquático macio que era capaz de atingir velocidades médias de 3,74 comprimentos corporais por segundo," conta o professor Jie Yin, da Universidade Estadual da Carolina do Norte, nos EUA. "Melhoramos esse projeto. Nosso novo robô macio é mais eficiente em termos energéticos e atinge uma velocidade de 6,8 comprimentos de corpo por segundo. Além disso, o modelo anterior só conseguia nadar na superfície da água. Nosso novo robô é capaz de nadar para cima e para baixo ao longo da coluna de água."
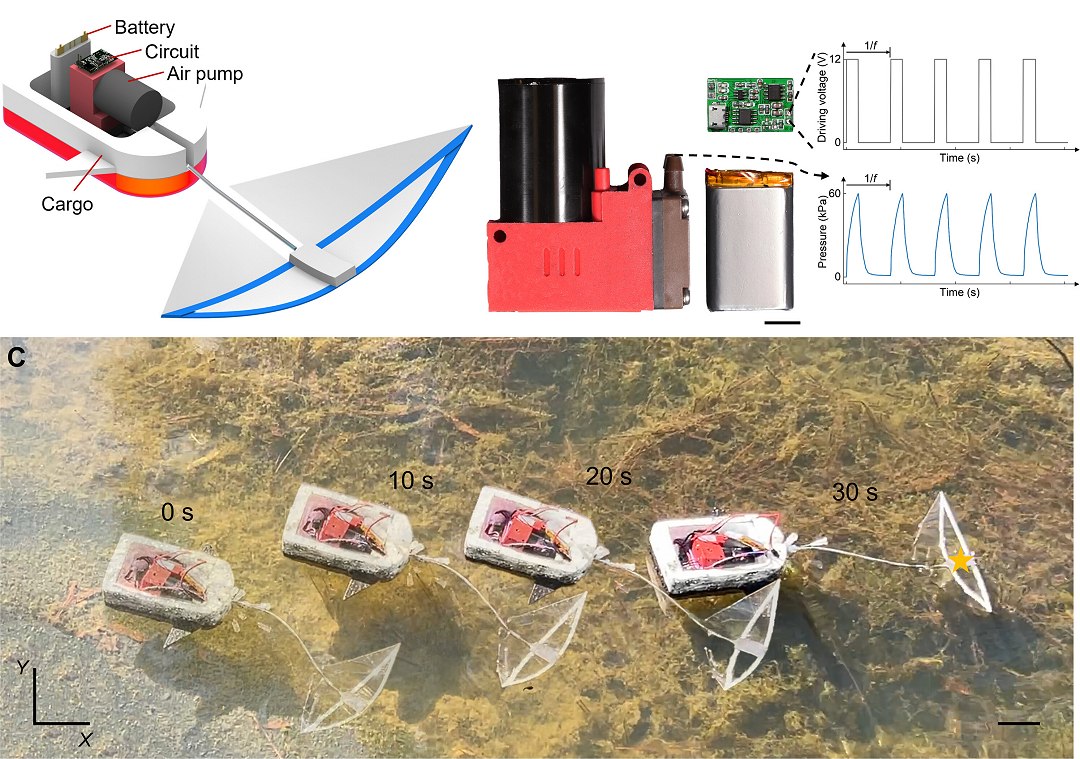
O robô macio tem nadadeiras em formato de arraia manta e é feito de um material que é estável quando as nadadeiras estão bem abertas. As aletas são fixadas a um corpo flexível de silicone que contém uma câmara que pode ser bombeada com ar. Inflar a câmara-de-ar força as nadadeiras a dobrarem - semelhante ao movimento descendente quando uma manta bate suas nadadeiras. Quando o ar sai da câmara, as aletas voltam espontaneamente à sua posição inicial.
Esse sistema de atuadores pneumáticos simplifica muito o projeto.
"Bombear ar para dentro da câmara introduz energia no sistema," explica o pesquisador Haitao Qing. "As aletas querem retornar ao seu estado estável, então liberar o ar também libera a energia nas aletas. Isso significa que precisamos apenas de um atuador para o robô e permite uma atuação mais rápida."
[Imagem: Haitao Qing et al. - 10.1126/sciadv.adq4222]
Engenharia de ponta com conceitos simples
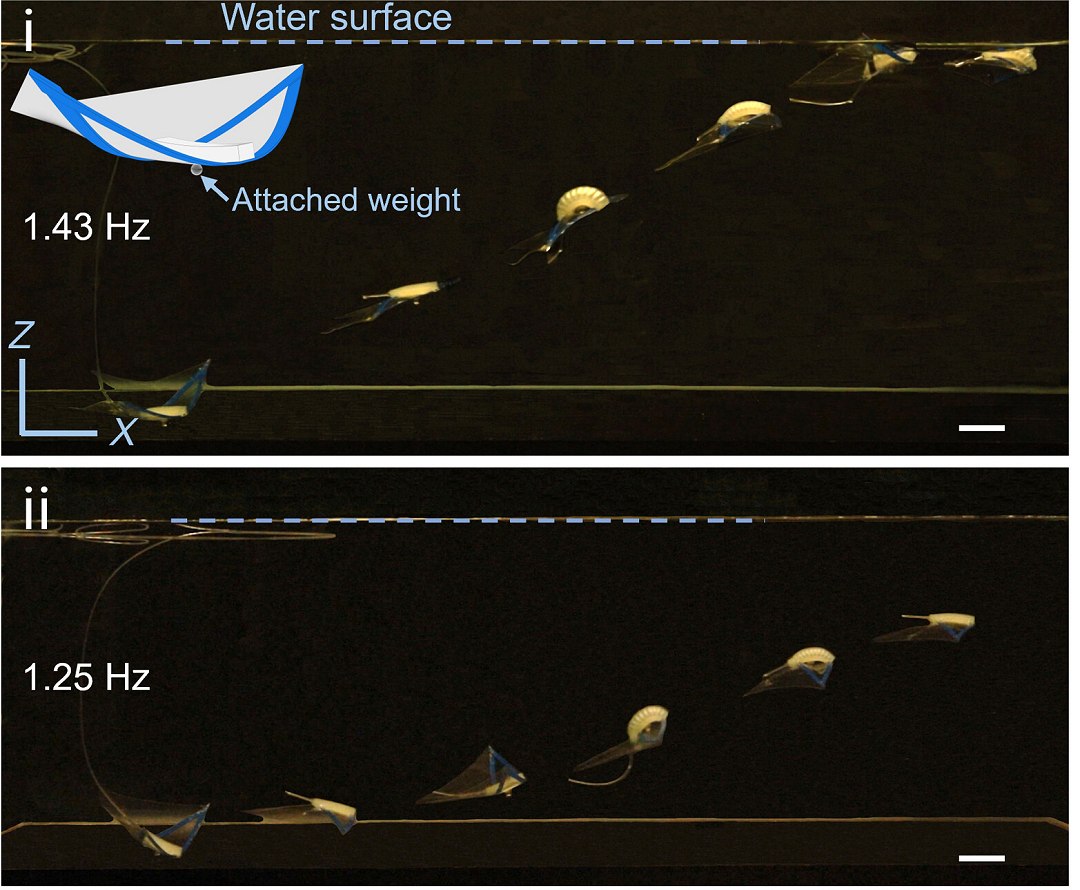
As simulações e os experimentos mostraram que o jato de água descendente produzido pelo movimento das barbatanas do robô é mais forte do que seu jato ascendente. Quando o robô bate as asas rapidamente, ele sobe, mas basta diminuir a frequência das batidas para que ele vá mais para o fundo.
"Quando as arraias nadam, elas produzem dois jatos de água que as movem para frente. As mantas alteram sua trajetória alterando seu movimento de natação. Adotamos uma técnica semelhante para controlar o movimento vertical deste robô nadador. Ainda estamos trabalhando em técnicas que nos darão um bom controle sobre os movimentos laterais," contou o pesquisador Jiacheng Guo.
Os pesquisadores demonstraram a funcionalidade do robô flexível de duas maneiras diferentes. Na primeira, o robô foi capaz de navegar por um percurso complexo, com obstáculos dispostos na superfície e no fundo de um tanque de água, mas ele ficou ancorado, recebendo ar comprimido do exterior. No segundo teste, o robô transportou uma carga útil na superfície da água, incluindo a sua própria fonte de ar e de energia, apontando para um futuro totalmente autônomo.
"Este é um projeto de engenharia de ponta, mas os conceitos fundamentais são bastante simples," disse Yin. "E, com apenas uma única entrada de atuação, nosso robô pode navegar em um ambiente vertical complexo. Agora estamos trabalhando para melhorar o movimento lateral e explorar outros modos de atuação, que irão melhorar significativamente as capacidades deste sistema. Nosso objetivo é fazer isso com um projeto que mantenha essa simplicidade elegante."
Artigo: Spontaneous Snapping-Induced Jet Flows for Fast, Maneuverable Surface and Underwater Soft Flapping Swimmer
Autores: Haitao Qing, Jiacheng Guo, Yuanhang Zhu, Yinding Chi, Yaoye Hong, Daniel Quinn, Haibo Dong, Jie Yin
Revista: Science Advances
Vol.: 10, Issue 49
DOI: 10.1126/sciadv.adq4222







Humanos como hardware: Computação é feita na pele do nosso braço
Descoberta nova fase da matéria: "Meio gelo, meio fogo"
Constantes fundamentais da natureza garantem supercondutores a temperatura ambiente
Ar-condicionado verde e de estado sólido alcança escala de quilowatts
Eletricidade é gerada usando rotação da Terra em seu próprio campo magnético
Painéis solares poderão ser fabricados na Lua fundindo o solo lunar
Espaço formado por "átomos de espaço" unifica mecânica quântica e relatividade
Água líquida não é única: São dois líquidos diferentes
Rival dos computadores quânticos tem avanço revolucionário
Lançado um "linux" para computadores quânticos
Humanos como hardware: Computação é feita na pele do nosso braço
Pequenos robôs viram células de materiais inteligentes que imitam a vida
Matéria ativa: Partículas inertes viram vermes sintéticos tridimensionais
Sensações táteis sem precedentes são obtidas com músculos artificiais
Inteligência não é suficiente. Vem aí a Imaginação Artificial
Leis da Robótica de Asimov precisam de atualização para IA
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.